RSS 2026 · Robotics: Science and Systems · Accepted
SanD-Planner: Sample-Efficient Diffusion Planner in B-Spline Space for Robust Local Navigation
A depth-only local planner that learns smooth B-spline trajectories with limited expert demonstrations, then selects safe candidates through an explicit ESDF-based critic.
Department of Computer Science
University College London
Abstract
The challenge of generating reliable local plans has long hindered practical applications in highly cluttered and dynamic environments. Key fundamental bottlenecks include acquiring large-scale expert demonstrations across diverse scenes and improving learning efficiency with limited data. This paper proposes SanD-Planner, a sample-efficient diffusion-based local planner that conducts depth image-based imitation learning within the clamped B-spline space. By operating within this compact space, the proposed algorithm inherently yields smooth outputs with bounded prediction errors over local supports, naturally aligning with receding-horizon execution. Integration of an ESDF-based safety checker with explicit clearance and time-to-completion metrics further reduces the training burden associated with value-function learning for feasibility assessment. Experiments show that training with 500 episodes, merely 0.25% of the demonstration scale used by the baseline, SanD-Planner achieves state-of-the-art performance on the evaluated open benchmark, attaining success rates of 90.1% in simulated cluttered environments and 72.0% in indoor simulations. The performance is further proven by demonstrating zero-shot transferability to realistic experimentation in both 2D and 3D scenes. The dataset and pre-trained models will also be open-sourced.
Method
Generate smooth paths, then select the safe one
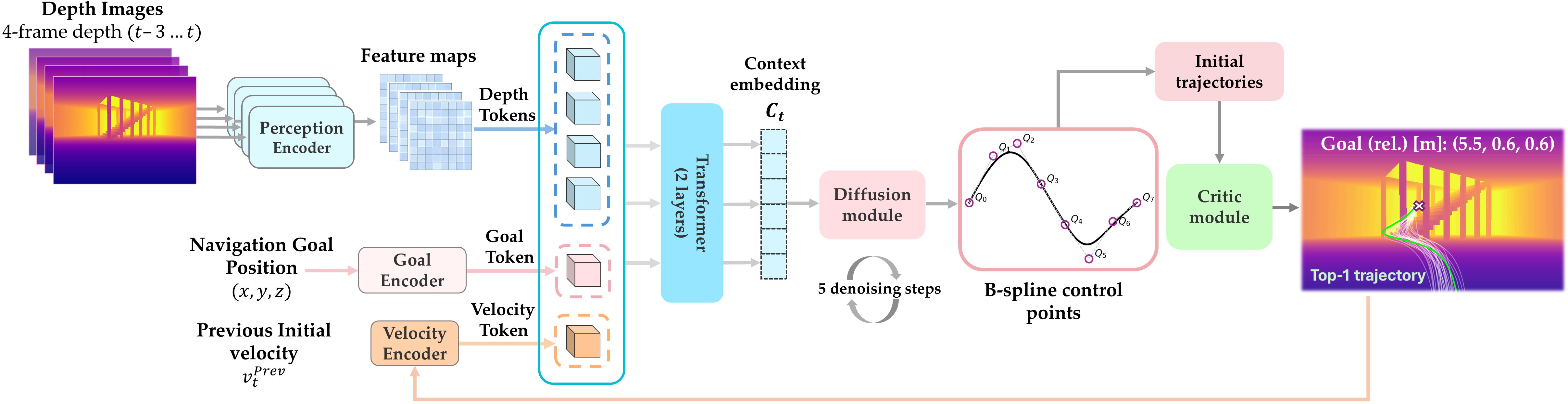
Condition Encoding
Encode depth history, relative point goals, and previous velocity into one planning context.
B-Spline Space
Represent local trajectories with eight clamped cubic B-spline control points.
Diffusion Policy
Sample diverse candidate trajectories directly in the compact control-point space.
Geometric Critic
Rank candidates with ESDF clearance and path-efficiency costs before execution.
Trajectory Representation
Why B-spline Control Points?
Waypoints
Compact, but not inherently smooth.
Near Δ 0.0
Full Δ 0.0
Cubic Spline
Smooth interpolation, but distal noise can distort the curve globally.
Near Δ 0.0
Full Δ 0.0
B-spline
Smooth control-point representation with local support and stable near-horizon execution.
Near Δ 0.0
Full Δ 0.0
Videos
Simulation and real-world demos
Simulation
Simulation demos
SIM
SIM
SIM
SIM
SIM
SIM
SIM
SIM
Real World
Real-world demos
REAL
Deployment
Unitree Go2 real-world deployment
Zero-shot transfer
Depth-only
No real-world fine-tuning
Physical deployment highlights sim-to-real navigation on Unitree Go2 under depth-only local planning.
Unseen cluttered Env
10Hz replanning enables up to 1m/s navigation
Depth-only stair climbing
Dynamic avoidance
Tighter-clearance traversal under a low overhang
Navigation in the dark
Results
Main findings
B-spline control points turn diffusion-based imitation learning into a sample-efficient and robust local planner.
ClutteredEnv
Geometric obstacle layouts
InternScenes
Photorealistic indoor settings
Cai W, Peng J, Yang Y, et al. NavDP: Learning sim-to-real navigation diffusion policy with privileged information guidance. arXiv preprint arXiv:2505.08712, 2025.
Sample efficiency
Strong performance is reported with 500 expert episodes, far below the baseline demonstration scale.
Zero-shot sim-to-real
The policy transfers to realistic 2D and 3D navigation scenes without real-world fine-tuning.
Citation
BibTeX
@article{wang2026sand,
title={SanD-Planner: Sample-Efficient Diffusion Planner in B-Spline Space for Robust Local Navigation},
author={Wang, Jincheng and Bao, Lingfan and Yang, Tong and Plasencia, Diego Martinez and Jiao, Jianhao and Kanoulas, Dimitrios},
journal={arXiv preprint arXiv:2602.00923},
year={2026}
}